
| NMRA DCC 鉄道模型 制御機器 製造販売専門 |

速度方向制御
速度方向制御
速度と進行方向の制御系ブロック図を示します。
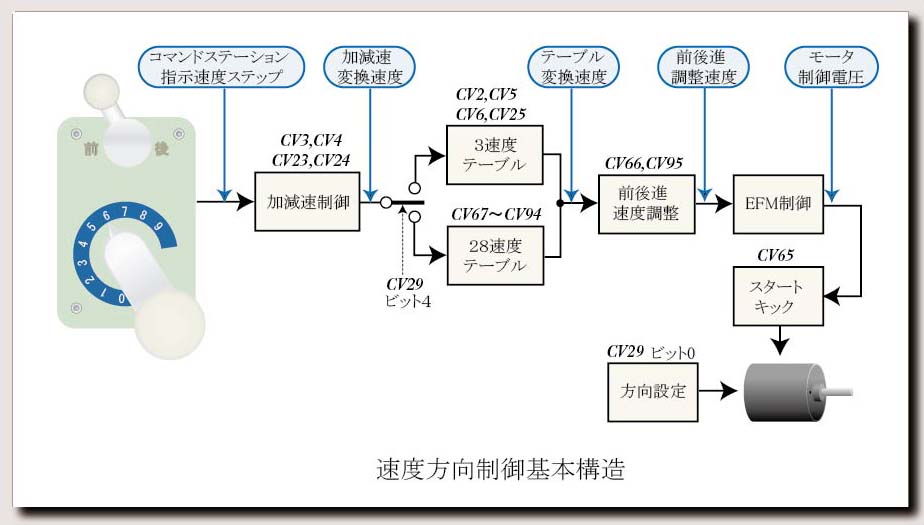
まず、コマンドステーションで指示された速度ステップは、加減速ブロックでゆるやかな速度変化になります。 次に、CV29 ビット4で3速度テーブルを使用するか、28速度テーブルを使用するか選択されます。 そして、選択された速度テーブルで加減速変換速度からテーブル変換速度へ変換します。 これは、EFMを使用していない時に、指示速度と車両の実際の速度を合わせる時などに使用できます。 次に、前後進で速度差がある車両に対応するため、前後進それぞれで速度調整を行います。 そして、極端にスタートが悪い車両の場合には、スタート時のキックを行い、 最後に車両の進行方向をCV29 ビット0によって決定します。
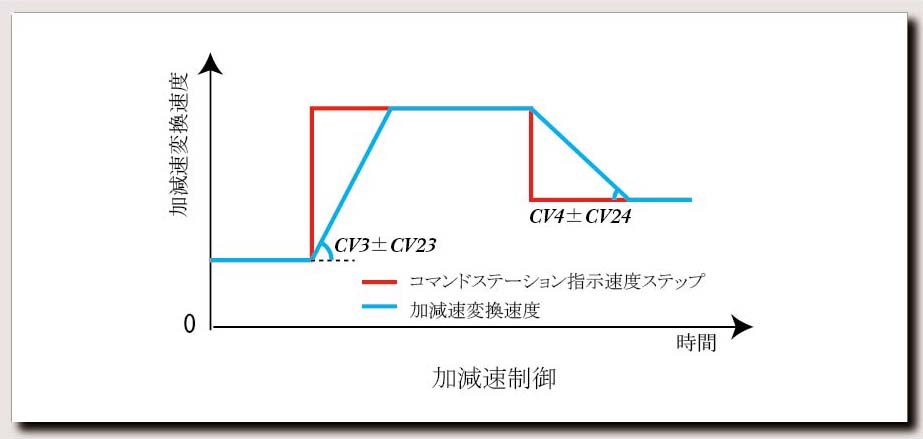
加減速制御
コマンドステーションで指示された速度が急に大きく変更しても、 車両の速度をゆっくり変化させることができます。
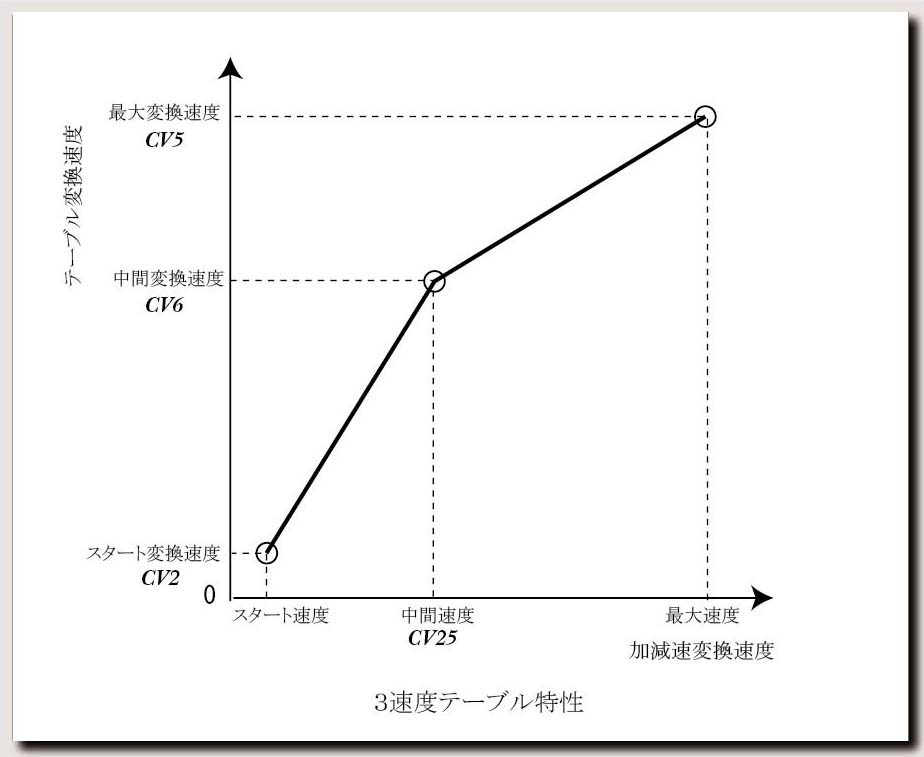
3速度テーブル
コマンドステーションから指示された速度を、モータ電圧にどのように変換するかCV設定値で決めることができます。 これは主に、コマンドステーションからの指示速度と車両速度を一致させるために使用します。 EFMが正常に作動している時は、コマンドステーションから指示速度と車両速度は比例するため、最大速度CV5 の調整のみで問題ありません。 しかし、実感的な走行を行う場合などは、コマンドステーションからの指示速度と車両速度を比例させないために使用することができます。 3速度テーブルでは、3点の設定だけが可能です。より細かな設定が必要な場合は、28速度テーブルを使用して下さい。
28速度テーブル
コマンドステーションから指示された速度を、モータ電圧にどのように変換するかCV設定値で決めることができます。 これは主に、コマンドステーションから指示速度と車両速度を一致させるために使用します。 EFMが正常に作動している時は、コマンドステーションからの指示速度と車両速度は比例するため、 28速度テーブルを使用する必要は通常ありません。3速度テーブルを使用し、最大速度CV5 の調整を行って下さい。 しかし、実感的な走行を行う目的などで、コマンドステーションからの指示速度と車両速度を比例させないために使用することができます。 28速度テーブルでは、28点の設定が必要です。大まかな設定で問題ない場合は、3速度テーブルを使用して下さい。

前後進速度調整
前後進で速度差がある車両に対応するため、前後進それぞれで速度調整を行うことができます。 EFMを使用している時は、調整する必要はありません。
方向設定
DCCにおいては、例えば①位側が前進である車両は、どちら向きにレールに置いても①位側が前進になります。 そのため、連結する時は常にそれぞれの車両の走行方向を揃える必要があります。もし、異なる場合はCV29 ビット1を反転して走行方向を変えて下さい。 走行方向レール基準特殊運転モードを使用すれば、この設定をする必要がなくなります。

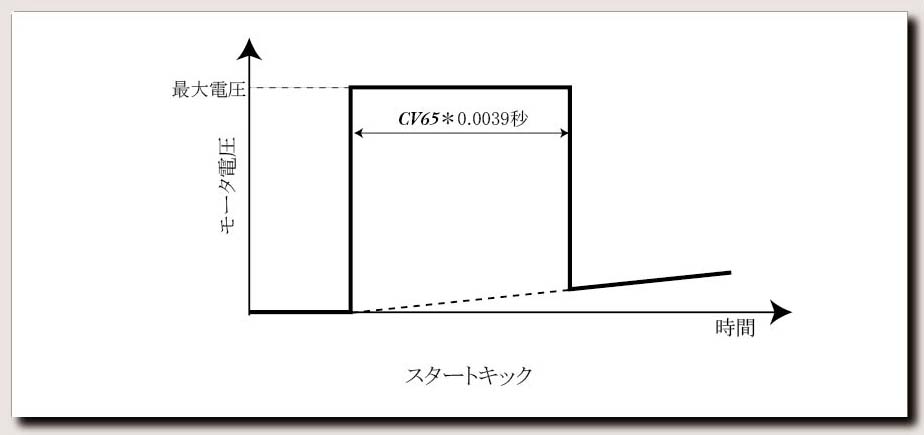
スタートキック
極端にスタートが悪い車両の場合には、スタート時に最高電圧を瞬間出すことにより、スタートできることがあります。 CV65 で最高電圧を出す時間を設定できます。EFMを使用している時は、使用する必要はありません。
アナログ制御とDCC制御の切り替え時速度
DCC制御からアナログ制御に切り替わる時は、アナログ制御での設定速度が高い場合はCV3とCV23によって設定される加速度に従って速度が変わります。 逆にアナログ制御での設定速度が低い場合はCV4とCV24によって設定される減速度によって速度が変わります。
アナログ制御からDCC制御に変わる場合は、最初の速度設定パケットが来る前は、CV4とCV24によって設定される減速度によって減速します。 最初の速度設定パケットが来た後は、DCC制御からアナログ制御に切り替わる時と同様に設定速度に加減速します。
