
| NMRA DCC Controller for Model Railroad |

Speed and Direction Control
Speed and Direction Control
Basic configuration of speed and direction control is illustrated as follows.
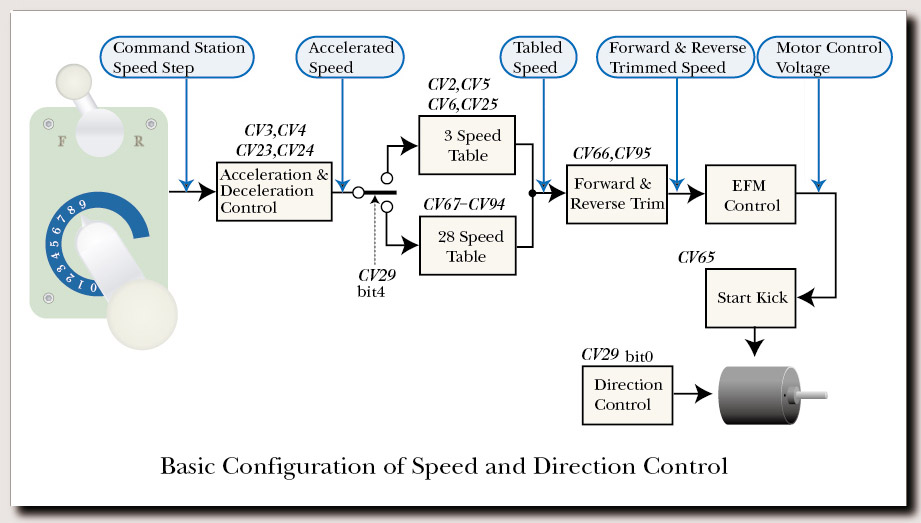
Firstly, speed step is directed by command station is changed to gentle speed step slope at acceleration and deceleration block. Nextly, 3 speed table or 28 speed table is selected according to CV29 bit4. And, accelerated speed is changed to tabled speed using selected speed table. This is used for adjusting accelerated speed to real speed when EFM is not used. Nextly, forward or reverse speed is trimmed individually for a vehicle having different forward and reverse speed. And start kick is perfomed for a vehicle having extreme rapid start. Lastly, direction is decided by CV29 bit0.
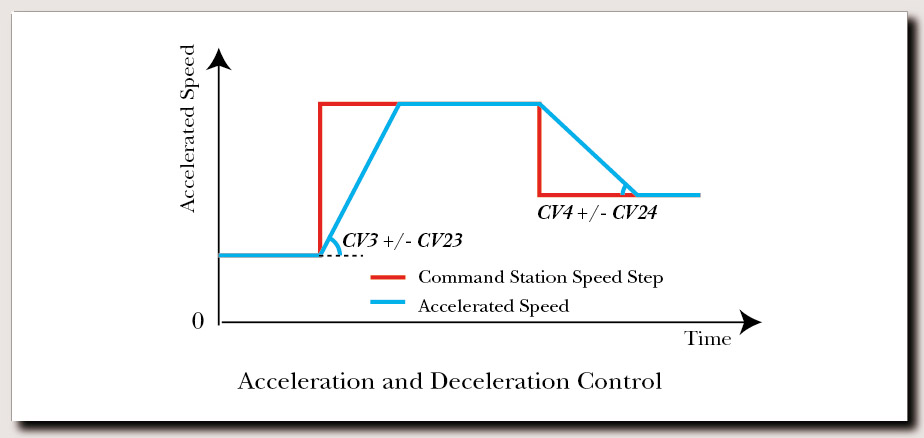
Acceleration and Deceleration Control
Speed can be changed with gentle slope, even when command station speed is changed with steep slope.
3 Speed Table
CV value can decide how to change command station speed step to motor voltage. This is used for adjusting command station speed step to real speed. When EFM is used, command station speed step is in proportion to real speed. In this case, only maximum speed CV5 is needed to adjust. In 3 speed table, only three position can be adjusted. When finer adjustment is needed, please use 28 speed table.

28 Speed Table
CV value can decide how to change command station speed step to motor voltage. This is used for adjusting command station speed step to real speed. When EFM is used, command station speed step is in proportion to real speed. In this case, 28 speed table is not needed to use. Please use 3 speed table and adjust only maximum speed CV5. In 28 speed table, 28 position has to be adjusted. When fine adjustment is not needed, please use 3 speed table.

Forward and Reverse Speed Trim
Forward or reverse speed is trimmed individually for a vehicle having different forward and reverse speed. When EFM is used, this trimming is not needed.
Direction Control
The model vehicle runs settled direction all the time as illustrated in below. For that, each vehicles are needed to connect with same direction. If direction is different, CV29 bit1 has to be change. If direction on rail basis mode is used, this setting is not needed.
Start Kick
Start kick is illustrated in Fig. V-6 helps a model vehicle having extreme rapid start. The period of time which maximum voltage is output can be set in CV65 when vehicle starts. This future is not needed, when EFM is used.

Speed when Analog and DCC control conversion
When control is converted from DCC to analog, if setting speed of analog control is higher than DCC control, speed changes by acceleration according to CV3 and CV23. Conversely, if setting speed of analog control is lower, speed changes by deceleration according to CV4 and CV24. When control is converted from analog to DCC, speed changes by deceleration according to CV4 and CV24 before first DCC speed and direction packet is received. After its packet is received, speed changes like control is converted from DCC to analog.
