
| NMRA DCC Controller for Model Railroad |

Safety Driving Mode
Automatic Stop and Slow Down by Asymmetric DCC
Automatic stopping or slow down is performed according to asymmetric DCC signal. When the model vehicle enters braking section in asymmetric DCC signal, automatic braking is performed and the model vehicle stops at constant distance regardless to speed. semi-asymmetric DCC signal makes a model vehicle slow down.

The Speed Control Operation of Braking Section.
The model vehicle can be controlled by controller to the distance that can stop in the decelaration set in CV153 as illustrated in Fig.below. The model vehicle will stop in higher deceleration than CV153 when it enters braking section at high speed. Stop position precision may worsen at low speed. Thus, Stop position precision decreases when the model vehicle runs braking section at low speed. For that CV159 for minimum speed in braking section can be set. For the same reason, stop position precision may decrease when a big value is set in CV153. When a model vehicle enters in breaking section in lower than speed to be set in CV159, it is accelerated to speed to be set in CV159 by acceleration to be set in CV153 . The model vehicle can stop when the instructions speed of the controller is zero. In this case ,the model vehicle can accelerate again, and can automatically stop at the stop position. When a model vehicle enters in breaking section in higher than speed to be set in CV154, it is decelerated to speed to be set in CV154 by acceleration to be set in CV153 . And a model vehicle can not run in heigher than speed to be set in CV154. CV155 is used for preventing that the speed of the rear vehicle which does not enter in braking section is different from the speed of the front vehicle.

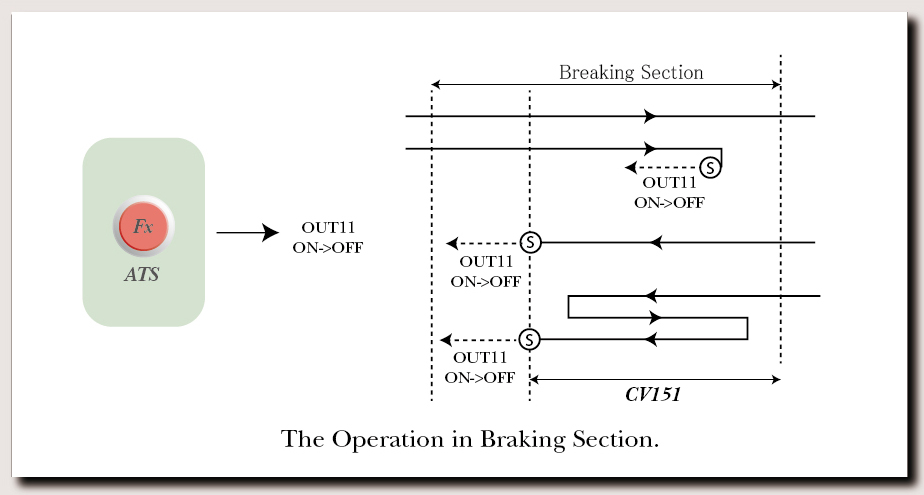
The Operation in Braking Section.
When a model vehicle enters in breaking section in a stopping direction and runs to the opposite irection and reverse a direction again, it can stop at the stop position. When a model vehicle enters in breaking section in a running direction runs in the instructions speed of the controller.It can not run to the opposite direction. When NMRA signal is turned on from off, a model vehicle can not run in a stopping direction but it can run in running direction. Please turn off internal function output OUT11 from on to cancel automatic stop operation temporarily in a breaking section. In this case stopping operation becomes effective again when it goes out of breaking section once. A function button can be used such as the ATS cancellation button switch assume that internal function output is assigned OUT11 to a function button by CV38 - CV46,CV130 - CV145. When Setting of CV27 is 3,12,15, by changes from the first on of the out11 to off, slow down operation is performed, and by changes from the second on of the out11 to off, the stop operation is canceled.
How to Connect Breaking Section.
A circuit diagram of breaking section is shown in figure below. A product made in SLOMO and a product made in other companies can be used as breaking section module. In the case of SLOMO low noise decoder, the dummy road for stability may be necessary in particular. When it is unstable after adjusting CV158, please connect it. Please use a product made in SLOMO or a decoder to consume current. But resistance cannot be connected directly to avoid influence rail com.

Automatic Driving.
We can move the train according to decided diagram, by using automatic driving script function of SLOMO controller and automatic stop by asymmetric DCC signal. It gradually slows down and stops at the stop position of the platform like a genuine train.
1. Area around station is made asymmetric DCC section by installing a module in the one side of the station.

2. Please decide the operation diagram of the train.

3. According to a operation diagram. please write the speed designation command of the train, the change command of the point, the stopping distance setting of the train at the next station to a script.
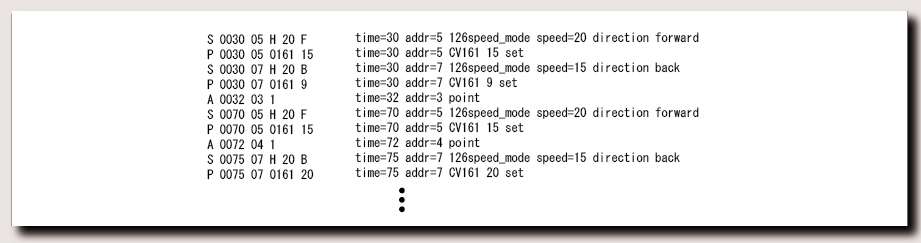
4. Please download the script to SLOMO controller.
5. Start automatic driving.