
| NMRA DCC 鉄道模型 制御機器 製造販売専門 |
モータ制御
EFM制御方式
モータの逆起電圧は、モータの回転速度に比例して大きくなります。 そこで、モータ駆動パルスを止めている間にその電圧を読んで、回転速度が設定速度と同じになるように制御します。

本デコーダでは、低速時の安定性と低騒音化を達成するために、パルスは3種類の周波数を重ねています。

低速度走行
モータを低速で動かそうとすると、今のところパルス駆動するしかないようです。 本デコーダでは、パルスのOFF時間をパルス毎に調整して、低騒音かつスムーズな低速運転を可能にしています。 このパルスOFF時間の変動幅を、車両に搭載されているモータ特性に合うように調整することによって、最高の低速走行を低騒音で行うことができます。

超低速度走行
停止状態のSTEP0から最低速度のSTEP1へ変更すると、どうしてもガクっと走り出す感じになってしまいます。 本物のように重量物がヌルっと走り出す感じとは違います。そこで、2つの機能を装備しました。
(1)速度変更スローアップダウン
速度ステップが変更される時に、128スピードステップ以下の刻みでゆっくり変更されます。 これにより、停止状態からスタートする時に、1STEP以下の速度で徐々に加速することができます。 さらに、徐々に速度変更する時も、意外とカクカクと速度上昇する感じが目立ちますが、 この機能によりスムーズに速度変更できます。

(2)超低速パルス出力
EFMパルスだけでは、モータによっては安定に走行できる最低速度に限界があります。 そこで、そのようなモータの場合に対して、EFMパルスよりもさらに低周波のパルスを出力し超低速を実現します。 但し、振動を伴うため、STEP1未満の超低速の時のみ使用します。

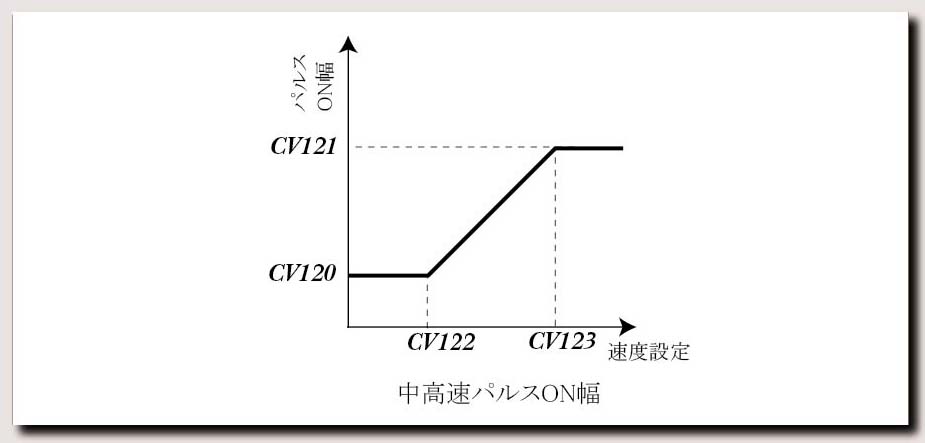
中高速度走行
中速度・高速度では、もともと低速度よりも安定に走行できるため、頻繁に速度監視をする必要がなくなります。 そのため、EFMパルスのON幅を低速時よりも大きくして騒音を低下させることができます。 実際は徐々にパルス幅を広くします。
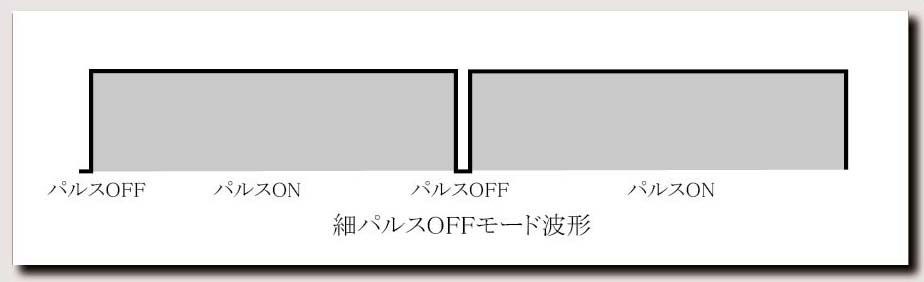
細パルスOFFモード(コアレスモータ専用)
真鍮製の車両は、プラスチック製の車両よりも車体に音が共鳴しやすいため、 EFMを使用した時にモータの騒音が大きくなってしまいます。そこで、 コイルのインダクタンスが小さく逆電圧が短い期間で終わるコアレスモータを使用している車両では、 パルスOFFの時間を短くして騒音を小さくすることが可能です。 ある程度の速度以上の場合に適用して下さい。低速では、通常のEFMパルスでないと安定に走行しません。
このモードはコアレスモータ専用です。コアードモータには使用しないで下さい。
プリセット設定値
モータの調整は設定値が多いため、調整を簡便化するためにプリセット値を設けました。 駆動系のタイプより近いプリセット値を選んで設定し、車両を走らせてみて問題がある場合は各CV値を調整して下さい。